
C01 Theory and robot experimental research on metacognitive adaptation extending the free energy principle
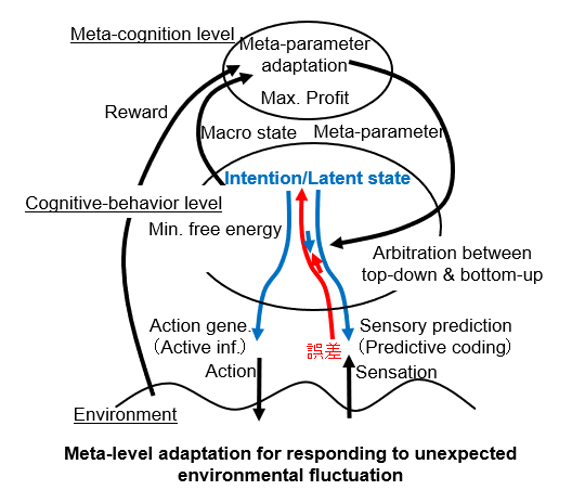
Generating appropriate actions in response to the environment is thought to be achieved by minimizing the free energy proposed by Friston, through the interaction between top-down actional intentions from higher regions acting on the environment and bottom-up sensations processed through lower regions. When environmental uncertainty fluctuates, an adaptive balance between the strengths of top-down and bottom-up signals is essential. If the former is too strong, the system becomes inflexible in adaptation to unexpected changes in the environment. Conversely, if it is too weak, the system becomes overfit to what should be negligible noise, leading to instability. Therefore, this study proposes that the balance between these two should be adaptively regulated at a metacognitive level with the aim of maximizing the system’s gain. By extending the free energy principle and deriving its adaptive mechanisms, this study aims to verify its operational characteristics through robotic behavioral learning experiments.

Principal investigator: Jun Tani
Professor, Cognitive Neurorobotics Research Unit, Okinawa Institute of Science and Technology Graduate University