C01 自由エネルギー原理を拡張したメタ認知適応に関する理論及びロボット実験研究
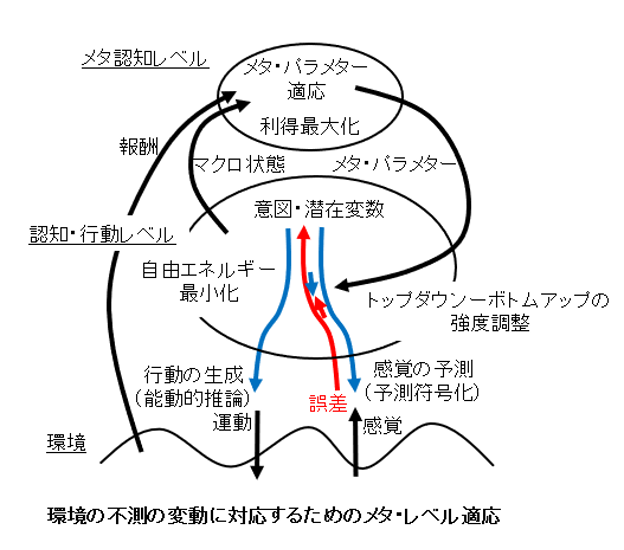
環境に対して行為を適切に生成することは、高次領域からの環境へ働きかけるトップダウンの意図と環境から低次領域を経てボトムアップする感覚が互いに相互作用することを経て、フリストンが提案するところの自由エネルギーを最小化することで達成されると考えられます。環境の不確かさが変動する場合、トップダウンとボトムアップの信号強度の適応的なバランスが不可欠で、前者が強すぎると系は環境での不測の摂動に不適応になります。逆に弱すぎると系は無視すべきノイズに対して過適応となり不安定化します。そこで本研究では、この両者のバランスは系の利得を最大化することを目的としてとして適応的にメタ認知レベルで調節されるべきと考え、自由エネルギー原理を拡張した上でその適応メカニズムを導出し、その作動特性をロボットの行動学習実験を行うことにより検証することを目指します。